The video in this article shows an automatic failsafe algorithm that allows a quadrocopter to gracefully cope with the loss of a propeller. The propeller was mounted without a nut, and thus eventually vibrates itself loose. The failure is detected automatically by the system, after which the vehicle recovers and returns to its original position. The vehicle finally executes a controlled, soft landing, on a user’s command.
The failsafe controller uses only hardware that is readily available on a standard quadrocopter, and could thus be implemented as an algorithmic-only upgrade to existing systems. Until now, the only way a multicopter could survive the loss of a propeller (or motor), is by having redundancy (e.g. hexacopters, octocopters). However, this redundancy comes at the cost of additional structural weight, reducing the vehicle’s useful payload. Using this technology, (more efficient) quadrocopters can be used in safety critical applications, because they still have the ability to gracefully recover from a motor/propeller failure.
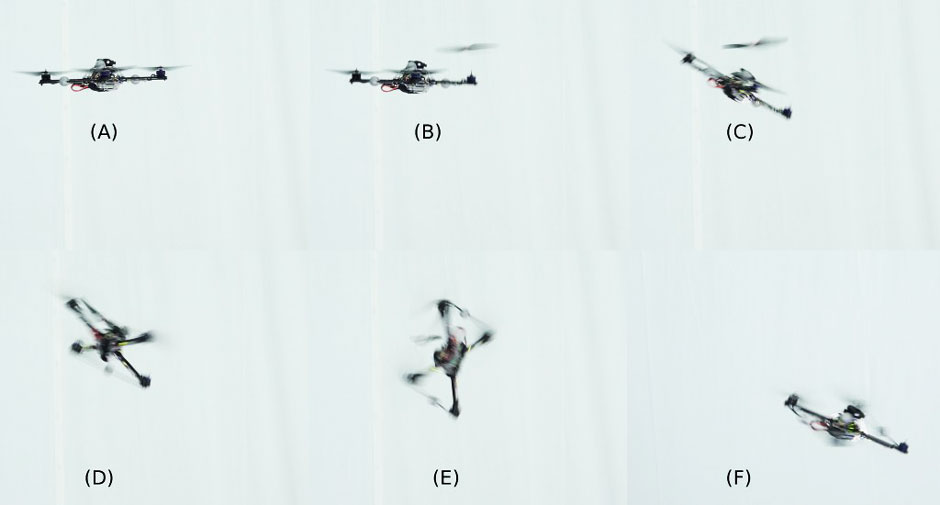
The key functionality of the failsafe controller is a novel algorithm that I developed as part of my doctoral research at the Institute for Dynamic Systems and Control at ETH Zurich. This new approach allows such a vehicle to remain in flight despite the loss of one, two, or even three propellers. Having lost one (or more) propellers, the vehicle enters a continuous rotation — we then control the direction of this axis of rotation, and the total thrust that the vehicle produces, allowing us to control the vehicle’s acceleration and thus position.
Even if the vehicle can no longer produce sufficient thrust to support its own weight, this technology would still be useful: one could, for example, try to minimize the multicopter’s velocity when it hits the ground, or steer the multicopter away from dangerous situations such as water, or people on the ground.
This control approach can also be applied to design novel flying vehicles — we will be releasing some related results soon.
This technology is patent pending.
For more information, have a look at the Flying Machine Arena website, the IDSC research page, or just post your question in the comments below.